|
นักวิจัย
ดร.ธีศิษฏ์ ลีลาสวัสดิ์สุข
ทีมวิจัยสมองกลอัจฉริยะและความจริงเสมือน (SMR) กลุ่มวิจัยไอโอทีและระบบอัตโนมัติสำหรับงานอุตสาหกรรม (IIARG) ศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ (NECTEC) |
||||||
|
สถานภาพสิทธิบัตร
ลิขสิทธิ์ เลขที่คำขอ 431337
|
||||||
|
ที่มา ข้อมูลเบื้องต้น ความสำคัญของปัญหา
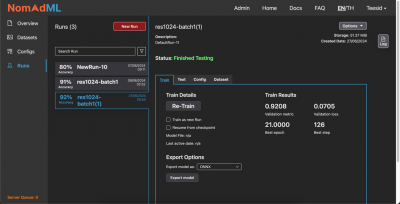
NomadML คือแพลตฟอร์มปัญญาประดิษฐ์ที่ถูกพัฒนาขึ้นสำหรับงานทางด้าน Computer vision โดยจุดเด่นของ NomadML คือมันถูกพัฒนาให้ใช้งานได้ง่ายและเหมาะสมกับผู้ใช้งานทุกประเภท ไม่ว่าจะเป็นผู้ใช้งานทั่วไปหรือผู้เชี่ยวชาญทางด้านปัญญาประดิษฐ์ ผู้ใช้งานที่ไม่มีประสบการณ์หรือไม่เคยเขียนโค้ดมาก่อนก็สามารถเริ่มต้นใช้งานและเทรนโมเดลจากข้อมูลหรือรูปภาพที่เตรียมไว้ก่อนได้
โดย NomadML ประกอบด้วยฟังก์ชันการทำงาน 3 รูปแบบดังต่อไปนี้ • การแยกประเภทวัตถุ (Image classification) คือขั้นตอนสำหรับการระบุชนิดของวัตถุที่อยู่ในภาพ • การตรวจจับวัตถุ (Object detection) คือขั้นตอนสำหรับการระบุตำแหน่งของวัตถุที่สนใจที่อยู่ในภาพ • การแยกพื้นที่ภาพ (Image segmentation) คือขั้นตอนในการแบ่งพื้นที่ของภาพตามชนิดของวัตถุที่ต้องการ |
||||||
|
สรุปและจุดเด่นเทคโนโลยี
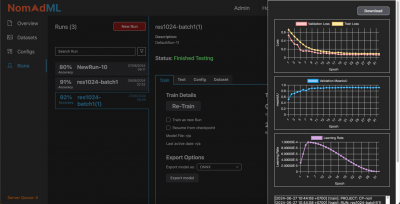
NomadML ได้รับการออกแบบมาให้ครอบคลุมทุกกระบวนการสำคัญที่ใช้ในการเทรนโมเดล ซึ่งประกอบด้วยการเทรนโมเดล การทดสอบโมเดล และการนำโมเดลไปใช้งานนอกระบบ ซึ่งทำให้สุดท้ายโมเดลที่ได้จากการเทรนด้วย NomadML จะไม่ถูกยึดติดว่าต้องใช้งานกับระบบ NomadML เท่านั้น
จุดเด่นอีกของ NomadML คือระบบการปรับค่าพารามิเตอร์แบบอัตโนมัติ (Automated hyperparameter optimization) ซึ่งเป็นรูปแบบการทำงานของระบบในการปรับและตั้งค่าพารามิเตอร์ในการเทรนโมเดลเพื่อให้ได้ผลลัพธ์ของโมเดลที่มีความแม่นยำสูงเมื่อเทียบเคียงกับผลลัพธ์โมเดลจากการปรับและตั้งค่าพารามิเตอร์โดยผู้เชี่ยวชาญ |
||||||
|
ความร่วมมือที่เสาะหา
เสาะหาผู้รับอนุญาตใช้สิทธิ
|
||||||
|
สถานภาพของผลงานวิจัย
ผลการทดลองระดับห้องปฏิบัติการได้รับการพิสูจน์ว่าเป็นไปได้ (TRL3)
|
||||||
  |
||||||
|
เงื่อนไข
เทคโนโลยีต่อรองราคา
|
||||||
|
สนใจสอบถามข้อมูล
งานธุรกิจทรัพย์สินทางปัญญา สำนักงานจัดการสิทธิเทคโนโลยี (TLO) สวทช. |
||||||
|