|
นักวิจัย
ว่าที่ ร.ต.พิชิตพล โชติกุลนันทน์ และคณะวิจัย
วิทยาลัยวิศวกรรมชีวการแพทย์ มหาวิทยาลัยรังสิต |
||||||
|
สถานภาพสิทธิบัตร
คำขอสิทธิบัตร เลขที่คำขอ 1801002268 ยื่นคำขอวันที่ 11 เมษายน 2561
|
||||||
|
ที่มา ข้อมูลเบื้องต้น ความสำคัญของปัญหา
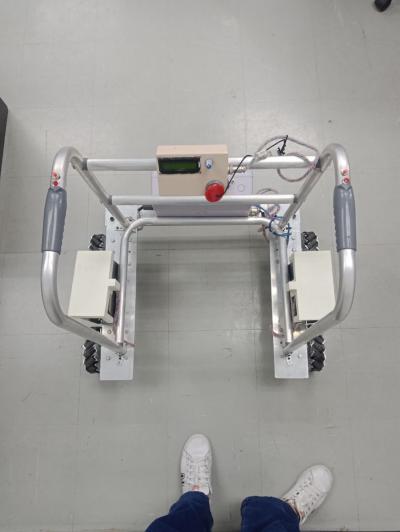
“อุปกรณ์ช่วยเดิน” เป็นเครื่องมือที่ช่วยเหลือการเดินของผู้ที่มีปัญหาในการเดินจากอุบัติเหตุ ผู้ป่วย หรือผู้สูงอายุ ปัญหาที่มักพบในการใช้อุปกรณ์เหล่านีโดยทั่วไปก็คือ การที่ต้องยกอุปกรณ์ช่วยเดินซึ่งทำให้ผู้ใช้ เกิดอาการเหนื่อยล้าและไม่สะดวกในการใช้งาน นอกจากนี้ ระบบล้อทั่วไปมักมีการเคลื่อนที่โดยไม่ได้ตั้งใจ ซึ่งอาจก่อให้เกิดอันตรายต่อผู้ใช้งานได้
“รถเข็นช่วยเดินชนิดเคลื่อนที่ได้รอบทิศทาง” ได้รับการพัฒนาคิดค้นขึ้นเพื่อตอบโจทย์การใช้งานของผู้ที่ต้องการฝึกเดิน อาศัยการเคลื่อนที่ของล้อแมคคานัมที่สามารถเคลื่อนที่รอบทิศทาง โดยใช้รีโมตหรือปุ่มบังคับ ใช้งานง่าย มีความปลอดภัยสูง โดยระบบการทำงานจะถูกตัดโดยอัตโนมัติเมื่อเกิดเหตุฉุกเฉินหรือกรณีมีปัญหาการเคลื่อนที่ นอกจากนี้ยังสามารถตั้งโปรแกรมต่างๆ เช่น การกำหนดระยะการก้าวเดินได้ ผลิตจากวัสดุที่หาได้ง่ายในประเทศ ต้นทุนการผลิตต่ำ ผ่านการทดสอบด้านความพึงพอใจจากผู้ใช้แล้ว |
||||||
|
สรุปและจุดเด่นเทคโนโลยี
• รถเข็นช่วยเดินสามารถเคลื่อนที่ได้รอบทิศทางสามารถกำหนดระยะการก้าวเดินได้
• มีระบบความปลอดภัย ตัดระบบเมื่อเกิดกรณีมีปัญหาการเคลื่อนที่ • ขั้นตอนการผลิตง่าย ต้นทุนต่ำ ใช้วัตถุดิบและเครื่องมือที่หาได้ง่ายในประทศ |
||||||
|
ความร่วมมือที่เสาะหา
เสาะหาผู้รับอนุญาตใช้สิทธิ
|
||||||
|
สถานภาพของผลงานวิจัย
ต้นแบบระดับ pilot scale ได้ถูกทดสอบในสภาวะทำงานจริง (TRL7)
|
||||||
 |
||||||
|
เงื่อนไข
เทคโนโลยีต่อรองราคา
|
||||||
|
สนใจสอบถามข้อมูล
วิทยาลัยวิศวกรรมชีวการแพทย์ มหาวิทยาลัยรังสิต |
||||||
|