|
นักวิจัย
นายราชันท์ ฟักเมฆ
บริษัท ที.ซี.เวลดิ้งออโตเมชั่น จำกัด |
||||||
|
สถานภาพสิทธิบัตร
อยู่ระหว่างยื่นคำขอ
|
||||||
|
ที่มา ข้อมูลเบื้องต้น ความสำคัญของปัญหา
เพื่อให้ sme ภาคการผลิต ได้มีหุ่นยนต์อุตสาหกรรม ที่คุ้มค่า เป็นเครื่องมือลดต้นทุน เพิ่มความเร็ว เพิ่มคุณภาพการผลิต และช่วยลดปัญหาแรงงาน เพิ่มความสามารถการแข่งขันได้ ดังนั้น sme จำเป็นต้องใช้หุ่นยนต์อุตสาหกรรม ที่มีพื้นที่การทำงานได้มาก ที่ทำงานได้หลายหน้าที่ หุ่นยนต์แบบคาน โครงการที่พัฒนาขึ้นในประเทศ เพื่อตอบโจทย์ดังกล่าว
|
||||||
|
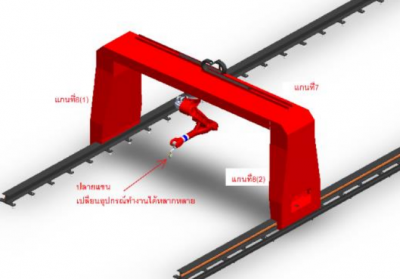
สรุปและจุดเด่นเทคโนโลยี
หุนยนต์ Gantry Robot ที่พัฒนาขึ้น ใช้แขนกล 6แกน ระยะเอื้อมแขน 1.5ม. รับน้ำหนักปลายแขน 6กก. ออกแบบโครงสร้างใหม่ให้ติดตั้งแบบแขวน เพิ่มแกนทำงานเป็น 8แกน ให้เคลื่อนที่ซ้าย-ขวาตามราง(แกนที่7)ได้ 4เมตร เคลื่อนที่หน้า-หลังตามราง(แกนที่8)ได้ 12เมตร นวัตกรรมคือ ทำให้ได้พื้นที่การทำงาน 48ตรม. ซึ่งมากกว่าแขนกลทั่วไป 12เท่า
และส่วนปลายแขน ออกแบบให้สามารถเปลี่ยนอุปกรณ์ ที่ เพื่อให้ทำงานได้หลายหน้าที่ แบบอัตโนมัติ ด้วยแขนกลตัวเดียว เช่น เชื่อมโลหะ ตัดโลหะ พ่นสี หยิบจับ วาด เขียน |
||||||
|
ความร่วมมือที่เสาะหา
เสาะหาผู้รับอนุญาตใช้สิทธิ
|
||||||
|
สถานภาพของผลงานวิจัย
ต้นแบบระดับ pilot scale ได้ถูกทดสอบในสภาวะทำงานจริง (TRL7)
|
||||||
 |
||||||
|
เงื่อนไข
เทคโนโลยีต่อรองราคา
|
||||||
|
สนใจสอบถามข้อมูล
บริษัท ที.ซี.เวลดิ้งออโตเมชั่น จำกัด |
||||||
|